7.5 Application de l'automatisation à bord: positionnement dynamique
Le positionnement dynamique est un système automatisé utilisé pour maintenir la position et l’orientation d’un navire à l’aide de propulseurs et de moteurs, sans avoir besoin de jeter l’ancre. Ce système est particulièrement utile pour des opérations en mer où une précision de positionnement est nécessaire, comme pour des travaux sous-marins, des forages, ou des opérations de chargement/déchargement en haute mer.
Principe de fonctionnement du positionnement dynamique :
1. Des capteurs et systèmes de référence : le système de positionnement dynamique utilise divers capteurs pour déterminer en temps réel la position et l’orientation du navire. Ces capteurs peuvent inclure :
• un GPS différentiel pour obtenir des coordonnées précises de la position du navire.
• un gyroscope pour déterminer l’orientation (cap) du navire.
• des réflecteurs acoustiques ou systèmes hydroacoustiques pour mesurer la distance et la profondeur sous le navire, utile en cas de faible visibilité GPS.
• des anémomètres et girouettes pour mesurer la force et la direction du vent.
• des capteurs de mouvement pour surveiller les mouvements du navire dus aux vagues et courants marins.
2. Un ordinateur de contrôle : le cœur du système est un ordinateur central qui reçoit les données des capteurs. Cet ordinateur :
• analyse en temps réel la position actuelle et la compare avec la position souhaitée.
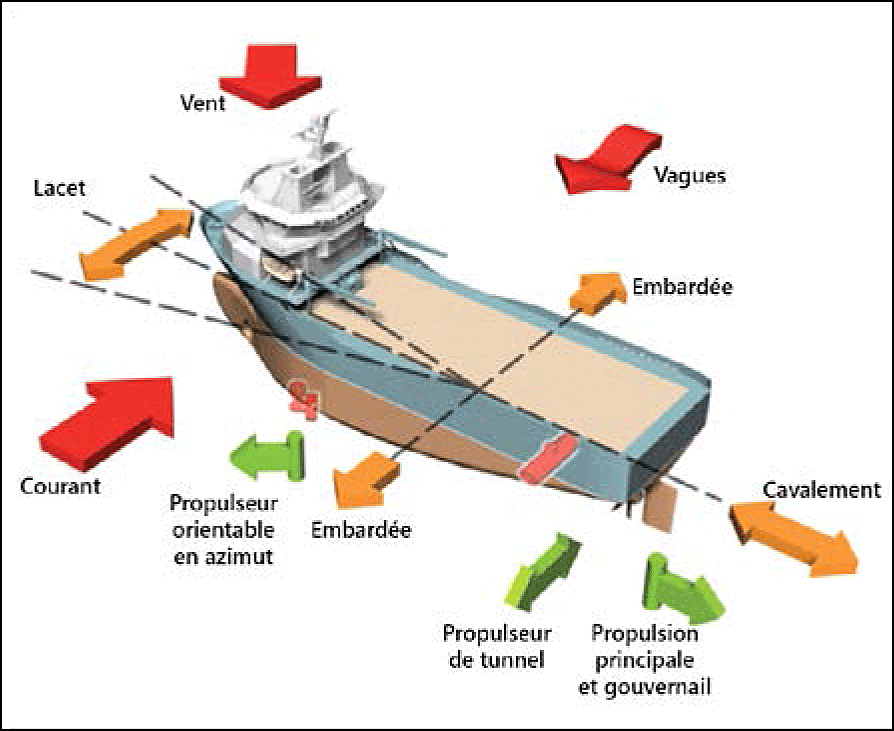
• calcule les forces externes qui agissent sur le navire (vent, courants marins, vagues).
• évalue la puissance nécessaire pour maintenir le navire en place malgré ces forces externes.
3. Des propulseurs et moteurs :
• le système contrôle directement les propulseurs d’étrave, les propulseurs arrières, et les moteurs principaux du navire. Ces propulseurs sont orientables pour générer la force et la direction nécessaires afin de compenser les dérives causées par les forces externes.
• en fonction des calculs de l’ordinateur, les propulseurs sont activés pour créer des poussées qui compensent exactement les forces exercées sur le navire (vent, courant, vagues), maintenant ainsi sa position.
Étapes principales d’utilisation du positionnement dynamique :
1. Fixer la position cible : le capitaine ou l’opérateur entre les coordonnées de la position ou de la trajectoire que le navire doit maintenir. Il peut également définir l’orientation souhaitée du navire, par exemple, en fonction des vagues.
2. Calcul des forces : l’ordinateur du système reçoit les informations des capteurs et calcule en permanence les forces externes agissant sur le navire.
3. Ajustement automatique : en fonction des calculs, l’ordinateur ajuste automatiquement les moteurs et les propulseurs pour maintenir la position du navire sans intervention humaine. Cela inclut :
• la compensation des dérives dues aux courants marins, vents ou vagues.
• le maintien de l’orientation du navire dans la bonne direction.
4. Surveillance constante : le système fonctionne en continu pour ajuster les poussées si les conditions changent, par exemple, si le vent se renforce ou que les vagues augmentent.